自动控制原理2-控制系统的时域分析法
一、一阶和二阶系统分析与计算
1.一阶系统分析与计算
对于一阶系统,求出其(闭环)传递函数,将其传递函数写成如下形式,其中
为常数 为时间常数 系统的单位阶跃响应为
一阶系统的调节时间(单位:秒(s))
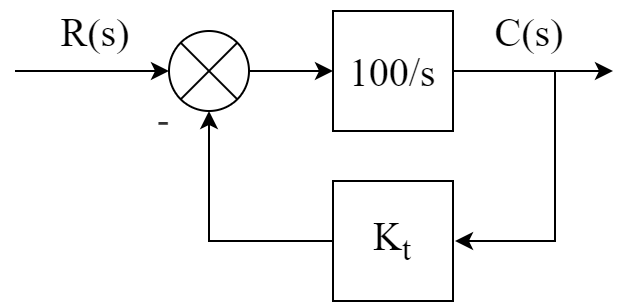
: 一阶系统如图所示,试求该系统单位阶跃响应及调节时间(5%误差带);当要求
s时, 该如何取值?
求出传递函数
故
,单位阶跃响应 ,调节时间 s 当
s时, ,解得
2.二阶系统分析与计算
对应二阶系统,求出其(闭环)传递函数,将其传递函数写成如下形式,其中
为常数 称固有频率, 称为阻尼比 过阻尼(
)系统的单位阶跃响应为 - 调节时间:
- 调节时间:
欠阻尼(
)系统的单位阶跃响应为 
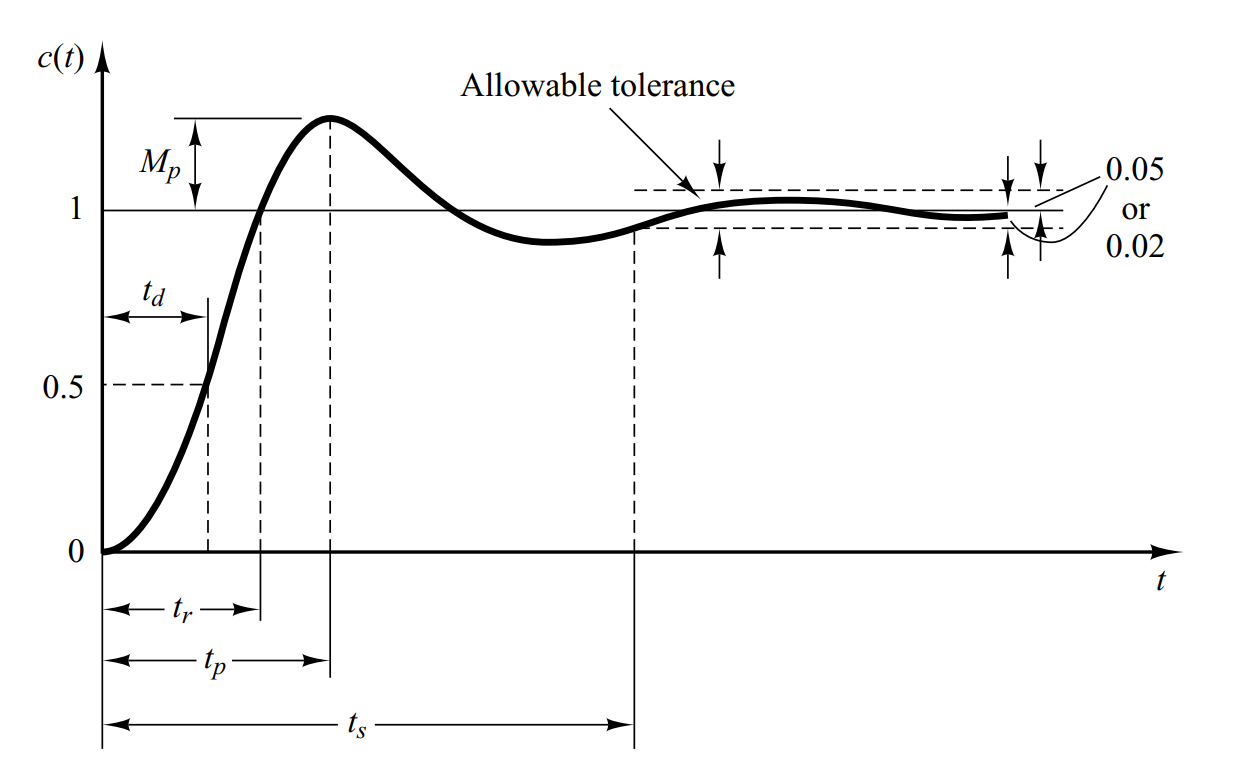
- 峰值时间(单位:秒(s)):
- 超调量:
- 瞬时最大量:
- 调节时间(单位:秒(s)):
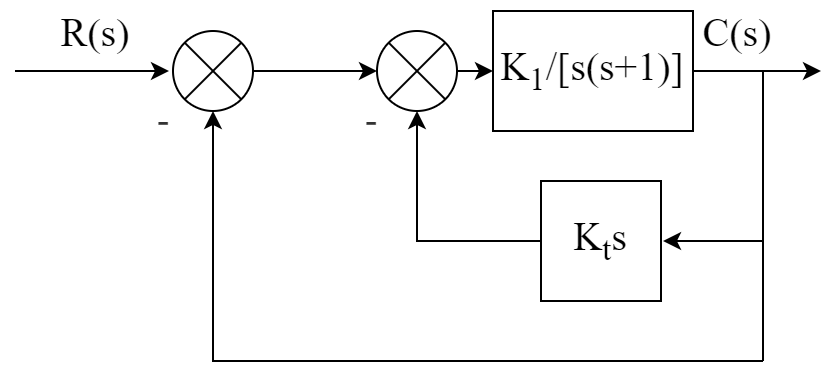
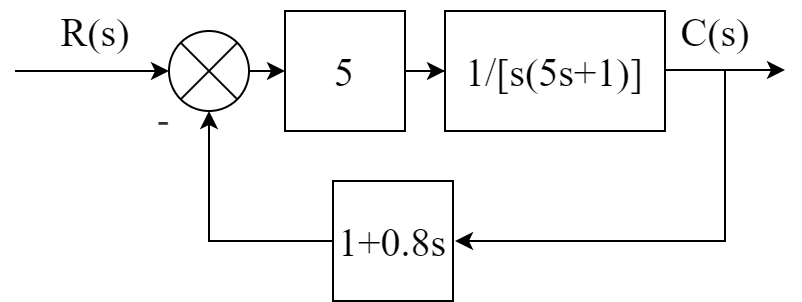
: 系统结构图如图所示,要求阶跃响应的指标
, s,试选取参数 的值。
系统的闭环传递参数
故有各参数
解得有各指标
解得
二、系统稳定性分析与稳态误差分析
1.劳斯判据进行系统稳定性分析
(1)系统稳定性的概念
闭环系统零极点分布图如上所示,横轴为实轴,竖轴为虚轴,点
系统函数
(2)劳斯判据
系统特征方程为:
列出劳斯表如下:
- 劳斯表的列头为
到 ,将方程的各系数间隔填入前两行,第一行为偶次系数 ,第二行为奇次系数 。如 为奇数,前两行能全部填完;如 为偶数则填不完的默认为0。 - 劳斯表中的一个元素
的求法如下,其中 为列数, 为行数

劳斯表整体呈一个阶梯为2的倒三角形式,每一列最后一个元素恒为
。 若劳斯表第一行有0值出现,则用任意小的
(正负任意)代替0继续计算。 若劳斯表出现0行,则可用0行前一行系数构造均为偶次的辅助方程
(从左到右依次为 ),用 的系数代替0行继续计算。
完成劳斯表后,可根据第一列判断系统稳定性:
- 若第一列所有元素符号相同但不为0,则系统稳定
- 第一列系数改变符号的次数,即不稳定根(正实部根)的个数,这时系统不稳定
- 如果第一列中的元素除了出现的0值外全部符号相同,则说明系统有临界稳定的特征根,系统临界稳定
- 劳斯表中出现0行,则说明存在大小相等,方向相反的根
: 已知闭环系统的特征方程,试用劳斯判据判别系统的稳定性。
第一列均大于0,该系统稳定
第一列有0,该系统临界稳定
若, ;若 , ,第一列符号不统一,该系统不稳定,符号变化2次,有两个正实部根
取0行前一行系数构建偶次辅助方程 ,求导得 ,系数除以4后
若, ;若 , ,第一列符号不统一,该系统不稳定,符号变化2次,有两个正实部根
若要使系统闭环极点的实部不大于
: 设控制系统开环传递函数
,要使系统闭环极点的实部不大于-1,试确定 的取值范围。
系统闭环特征方程为
代入
得
整理得得到劳斯表
故有
解得。
2.控制系统的稳态误差分析
(1)系统误差相关概念
误差(
为输出, 为输入) 系统误差
稳态误差
注意:求解系统稳态误差首先要判断系统稳定性
(2)稳态误差的终值求法
闭环传递函数与开环传递函数的转换(
为开环传递函数, 为闭环传递函数)
系统的整体传递函数为闭环传递函数终值定理求法(
为闭环传递函数)
终值定理的适用条件是和 存在,若不存在则不适用该方法
(3)系统结构参数求稳态误差法
系统的开环函数写成如下形式:
称为开环增益, 为积分环节数目, 分别称为0型系统、I型系统和II型系统 静态误差系数
稳态误差、静态误差系数与积分环节个数和输入信号之间的关系
| 系统型别 | 静态误差系数 | |||
|---|---|---|---|---|
| 0型系统 | ||||
| I型系统 | ||||
| II型系统 |
: 系统结构图如图所示,已知输入信号
,求系统的稳态误差 。
判别系统稳定性
闭环传递函数为
特征方程为由劳斯判据
系统稳定由终值定理求稳态误差
或由结构参数求稳态误差
开环传递函数
,为I型系统
,有 ; ,有 ,故
- Title: 自动控制原理2-控制系统的时域分析法
- Author: OwwO99
- Created at: 2023-09-12 22:04:06
- Updated at: 2023-09-12 22:26:44
- Link: https://redefine.ohevan.com/2023/09/12/2023-9-12-自动控制原理2-控制系统的时域分析法/
- License: This work is licensed under CC BY-NC-SA 4.0.