自动控制原理3-控制系统的状态空间分析法
一、状态空间方法基础
1.系统的状态空间表达式
单输入-单输出线性定常系统且输入不含导数项情况的微分方程如下:
选取
系统的输出方程为
写成矩阵形式,有
: 设系统方程为
,试求系统的状态方程和输出方程。
令
,有
有输出方程为
2.线性定常系统状态方程的解
其次向量微分方程
定义状态转移矩阵
求解公式为(二阶矩阵求逆:主对调,次换号,除以行列式)
在已知
: 设系统状态方程为
, ,试求状态方程之解。
先求出状态转移矩阵
求解得
3.传递函数矩阵
设系统的状态方程、输出方程为
定义传递函数矩阵为
系统的特征方程即为
: 设系统动态方程为
, ,试求该系统的传递矩阵。
求得
计算得
二、线性系统的可控性和可观测性
1.线性系统的可控性
(1)可控性判据
单变量线性定常系数的动态方程为
系统可控性的充分必要条件是(
注意
(2)可控标准型
单输入系统
如果系统可控,令(其中
有可控标准型
(3)可控性分解
当系统不具有可控性时,选取
系统方程具有如下形式
有可控动态方程
: 设系统状态方程为
,其中 ,试将系统状态方程化为可控标准型。
先判定系统可控性
系统可控求得
最终得
补充:矩阵求逆——利用初等行变换
2.线性系统的可观测性
(1)可观测性判据
单变量线性定常系数的动态方程为
系统可观测性的充分必要条件是(
注意
(2)可观测标准型
一个单输入系统
如果系统可观测,令(其中
有可观测标准型
(3)可观性分解
当系统不具有可观测性时,选取
系统方程具有如下形式
有可控动态方程
:(注意,该例可能有误) 设系统动态方程为
, ,试将系统的动态方程化为可观测标准形,并求出其变换矩阵。
先判定系统可观测性
系统可观测求得
最终得
3.传递函数的动态方程实现
设给定有理函数
则有可控标准型的实现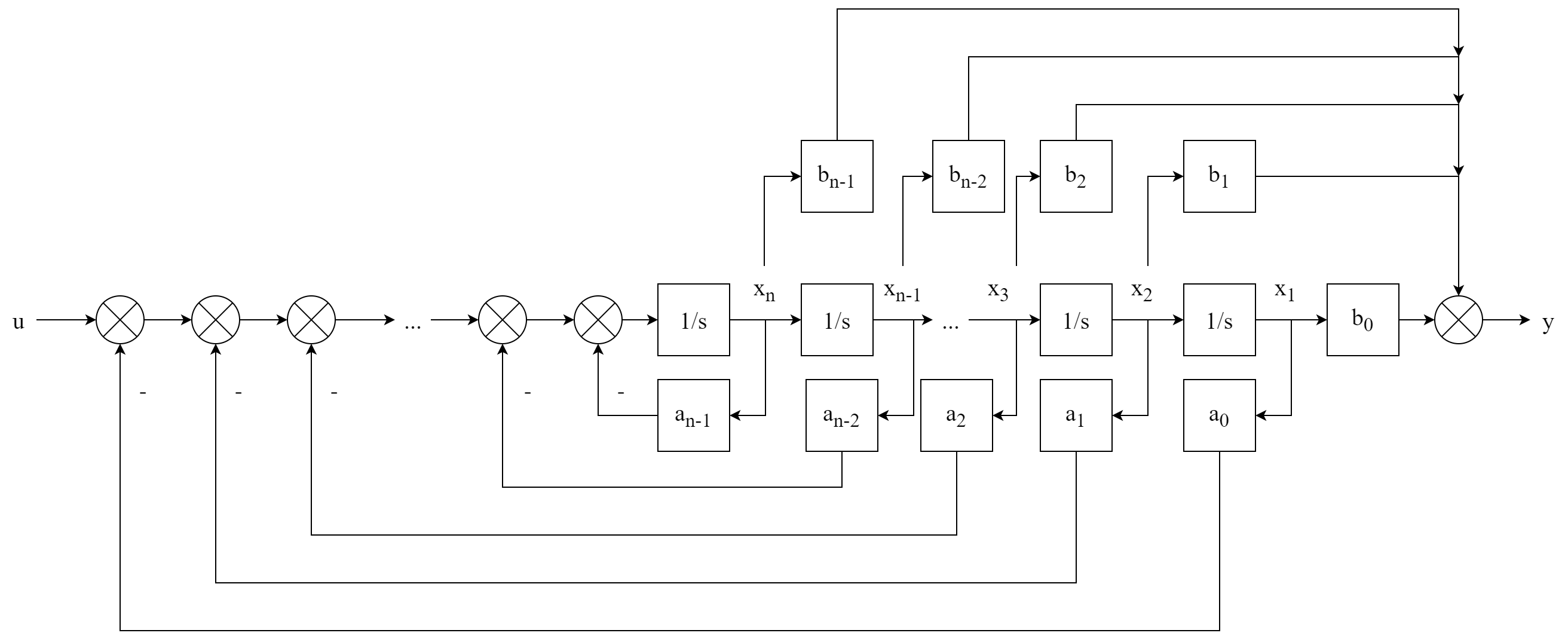
则有可观标准型的实现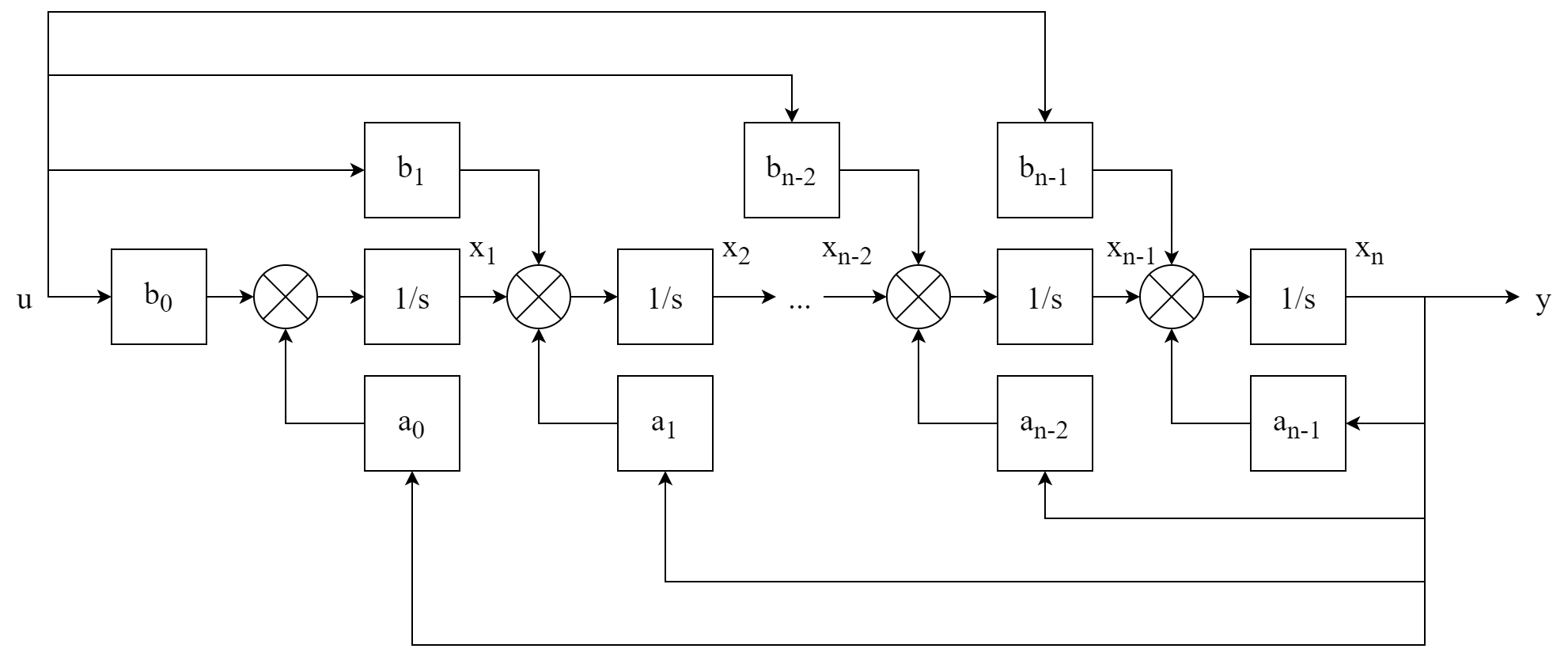
可以观察到可控标准型
注意:如果
: 写出传递函数
的可控标准型和可观标准型的实现。
先进行长除法:
化为可控标准型
化为可观标准型
该传递函数分子最高次项为
,如画动态结构图,应注意。
三、状态反馈与状态观测器
1.由闭环系统具有任意要求特征值计算增益向量
(1)化可控标准型求解
计算
的特征式 由所给的
个期望特征值 计算期望的多项式 有
计算可控标准型变换矩阵
有增益向量
(2)待定系数法求解将
表示为 ,计算 将上式与期望特征式比较,令
的同次幂系数相等,得到包含 个未知量的 的 个方程 在系统可控的条件下,解得方程即可得出
。
: 设系统动态方程为
,若加状态反馈使闭环特征值分布为 ,试求状态反馈增益阵 。
设
,有 期望多项式为
有
故有
2.状态观测器
对于系统动态方程
设观测器的增益矩阵
根据给定特征值
比较两多项式中
: 设系统动态方程为
,试设计特征值在-10,-10的状态观测器。
设
,有 期望多项式为
有
得到观测器的方程为
四、有界输入和有界输出的稳定性
1.渐近稳定和BIBO稳定的判定
对于动态方程
若
若
: 设系统动态方程为
,试分析其渐近稳定性和BIBO稳定性。
特征方程为
特征值为+2,-3,不均在负平面的左半部,故系统不是渐近稳定的。传递函数为
极点-3具有负实部,则系统是BIBO稳定的。
2.李雅普诺夫第二方法
对于动态方程
该系统的解
一般取
补充:正定矩阵的判定——矩阵的各阶主子式均为正数,则矩阵正定
: 考虑二维系统
,试确定平衡状态 是否渐近稳定。
令
,设 解
得,为正定对称阵,故 是渐近稳定的。
- Title: 自动控制原理3-控制系统的状态空间分析法
- Author: OwwO99
- Created at: 2023-09-12 22:30:06
- Updated at: 2023-09-12 23:21:57
- Link: https://redefine.ohevan.com/2023/09/12/2023-9-12-自动控制原理3-控制系统的状态空间分析法/
- License: This work is licensed under CC BY-NC-SA 4.0.