智能控制1-模糊控制
一、专家控制
1.专家系统
(1)定义
专家系统是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力。
(2)专家系统的构成
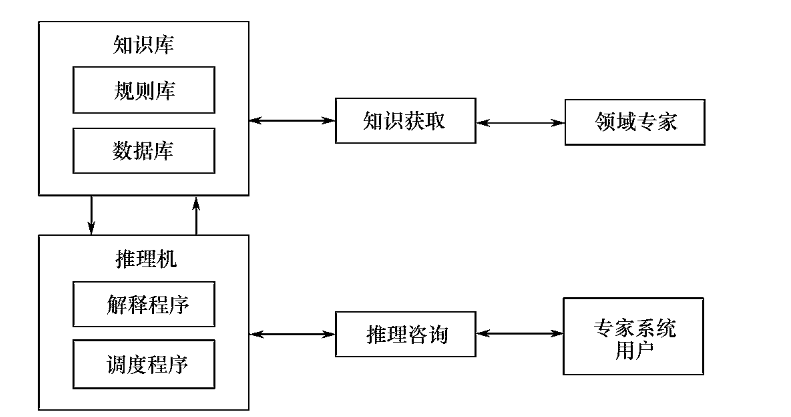
- 知识库:知识库包含多种功能模块,主要有知识查询、检索、增删、修改和扩充等。知识库通过人机接口与领域专家相沟通,实现知识的获取。有专家知识、控制性规则、数据三种知识。
- 推理机:推理机是用于对知识库中的知识进行推理来得到结论的“思维”机构。有正向、反向、双向三种推理方式。
- 知识的表示:产生式规则——if E then H with CF(E, H)。E是前提,H是结论,CF是规则强度。
- 专家系统建立步骤:知识库设计-推理机设计-人机接口设计
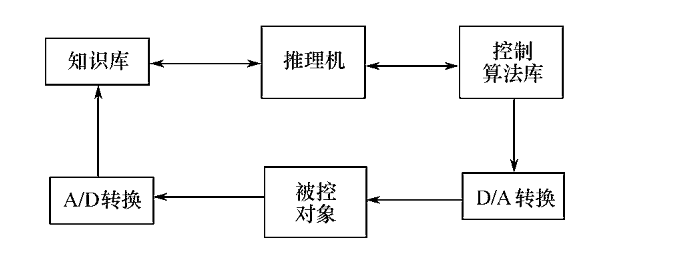
2.专家控制
(1)定义
谓专家控制,是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。
(2)专家控制的基本原理
- 专家控制与专家系统的区别
- 专家系统能完成专门领域的功能,辅助用户决策;专家控制能进行独立的、实时的自动决策。专家控制比专家系统对可靠性和抗干扰性有着更高的要求。
- 专家系统处于离线工作方式,而专家控制要求在线获取反馈信息,即要求在线工作方式。
- 专家控制的分类
- 直接型专家控制器:用于取代常规控制器,直接控制生产过程或被控对象。
- 间接型专家控制器:用于和常规控制器相结合,组成对生产过程或被控对象进行间接控制的智能控制系统。
二、模糊控制的理论基础
1.模糊集合的基本概念——隶属度与隶属函数
(1)隶属度
给定论域
称
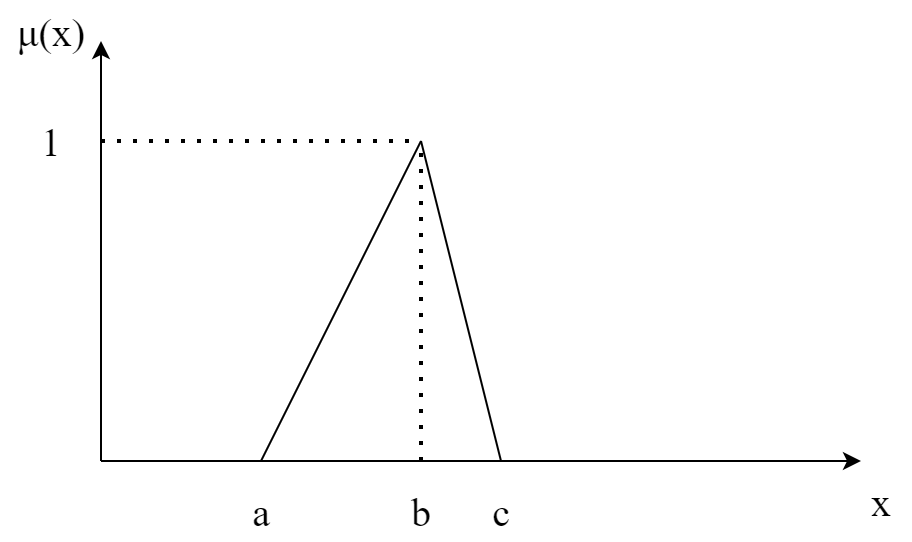
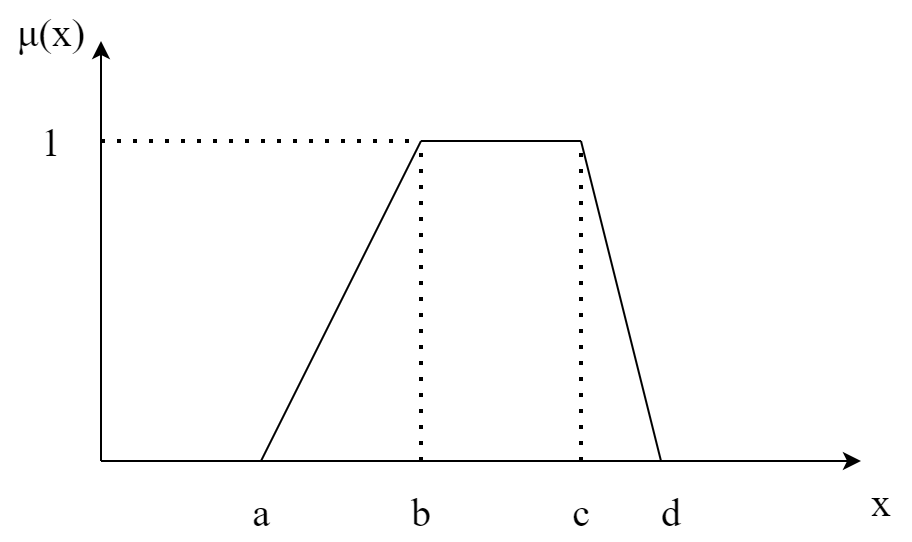
(2)常见隶属度函数:高斯型、S型、梯形、三角形、Z形
三角形隶属度函数

梯形隶属度函数
(3)隶属度函数的确定方法:模糊统计法、主观经验法、神经网络法、统计三分法
统计三分法:
设
是满足 的连续随机变量,可以确定三个模糊集合的隶属度函数为
其中分别为 和 的边缘分布密度函数。
: 设
,请用三分法确定三个模糊集合的隶属度函数。
标准正态分布的概率分布和概率密度函数为
有三个模糊集合的隶属度函数为
(4)模糊截集与分解定理
模糊集合
的 截集 是一个经典集合,有 分解定理:设
是论域 上的一个模糊集合, 为 的 截集,有下式成立
其中表示 上的一个模糊子集,其隶属度函数为
: 设有模糊集合
,按分解定理给出模糊集合的分解表达。
求出所有截集
根据分解定理
2.模糊集合的表示与运算
(1)模糊集合的表示
离散元素的模糊集合表示
其中为元素 对模糊集合 的隶属度。 连续元素的模糊集合表示
(2)模糊集合的相关定义
- 空集:
是空集当且仅当 - 全集:
是全集当且仅当 - 等集:
当且仅当 - 子集:
当且仅当
(3)模糊集合运算
补集:
交集:
并集:
(4)运算律
满足:交换律、结合律、分配律、幂等律、双重否定律、同一律、零一律、吸收律、德摩根律
- 吸收律
- 德摩根律
- 不满足:互补率
: 设
, ,求 。
3.模糊关系及运算
(1)模糊关系
- 模糊集合的笛卡尔积:设
,则 为模糊矩阵,其中元素 表示 ,其中 是 第 个元素, 是 第 个元素。(或将 看作行向量 ) - 模糊关系:
即为 上的一个模糊关系。 - 模糊关系的运算:模糊矩阵间的交并补均针对对应位置上的单个元素。
(2)模糊关系的合成
设
类似矩阵乘法,将×换为
:
,求 。
4.模糊推理
Mamdani模糊推理法:If
(1)已知
- 将
看作行向量,计算 。 - 将
按行展开得到列向量,得到 。 - 计算
。
(2)已知
- 将
看作行向量,计算 。 - 将
按行展开得到行向量,得到 。 - 计算
。
:
,求模糊关系 以及输入为 时的输出 。
- 故
5.模糊关系方程——近似试探法
- 首先确定可以显然看出取值范围的量
- 对于其他量,进行分类讨论,即确定一个量的结果,求其他量的取值范围,最后根据分类讨论的结果确定最终取值范围
: 求解方程
- 由方程得
即三个括号中的值均不超过0.4且至少有一个等于0.4,可以确定的是
显然小于0.4,故
分类讨论
假设
,则 ,同时 显然小于等于0.4,故 假设
,则 ,要求 ,有 根据分类讨论结果,有
三、模糊逻辑控制
1.模糊控制系统的组成
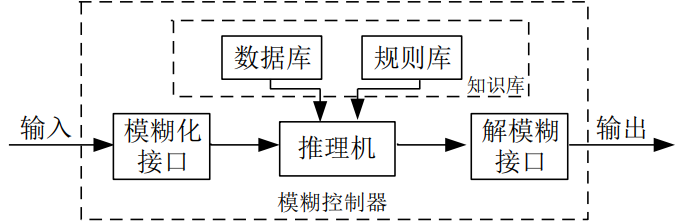
- 模糊化接口:将真实的确定量输入转化成一个模糊矢量。
- 知识库:由数据库和规则库构成。数据库存放输入输出的隶属度或隶属函数,规则库存放模糊控制规则。
- 推理与解模糊接口:推理是模糊控制器中,根据输入模糊量,由模糊控制规则完成模糊推理来求解模糊关系方程,并获得模糊控制量;解模糊是将模糊控制量转换求得清晰的控制量输出。
2.模糊控制系统设计的一般步骤
(1)确定控制系统的输入输出,确定控制系统的类型结构
- 对于多输入、单输出系统,称其为单变量模糊控制器,若有
个输入,则称其为(单变量) 维模糊控制器 - 对于多输入、多输出系统,称其为多变量模糊控制器
(2)量化,即确定输入量和输出量的论域
对于离散量,将离散量映射到
个离散值上,称该量化等级为 对于连续量,可以将连续量等比例映射到
个离散值上,称该量化等级为 ;也可以将连续量等比例映射到一个区间内 计算比例因子,用于衡量量化幅度
输入量的比例因子用于输入量模糊化,有
输出量的比例因子用于输出量解模糊化,有
(3)模糊化,即在输入量和输出量的论域内定义模糊集及其隶属度函数
确定模糊集的个数,模糊集的个数称为语言值,一般来说常取以下几种
在设计时,可根据需要选取对称的几个模糊集离散模糊量采用表格的形式描述其隶属度函数
表中第
行第 列的值表示量化等级 在模糊集合 中的隶属度值
| 模糊集\隶属度\量化等级 | |||
|---|---|---|---|
| 模糊集1 | |||
| 模糊集 |
- 连续模糊量采用曲线方程的形式描述其隶属度函数
(4)确定模糊控制规则,构建模糊控制规则表
模糊规则通常会直接给出
一般来说,若模糊输入量有
个,第 个输入量对应的语言值有 个,则模糊控制规则最多有 条 规则表描述在特定输入组合下的特定输出:一个输入量,构造长度为
的一维规则表;两个输入量,构造大小为 的二维规则表 表中第
行第 列的内容表示输入量1 模糊集 ,输入量2 模糊集 时的输出属于的模糊集
| 输入量1\输出\输入量2 | 输入量2 | 输入量2 | |
|---|---|---|---|
| 输入量1 | 输出量 | 输出量 | |
| 输入量1 | 输出量 | 输出量 |
(5)模糊推理
未知给定输入,求模糊关系
一维模糊控制器:If
then
已知输入,则输出 二维模糊控制器:if
and then
已知输入,则输出
给定输入(确定值),由模糊推理得出输出的模糊集合
根据给定的输入,将其量化,再模糊化;根据输入可能属于的模糊集合,寻找匹配的模糊规则
假如有输入
,输出 , ,有规则 :If A and B then C,则有
得到一个模糊集(图像的效果是削顶)
如果规则是If A then C,则如果规则是If A or B then C,则有
将所有满足的规则得到的模糊集并起来(取最大值)
即得到最终模糊推理得到的模糊集合
(6)反模糊化,将模糊推理得到的模糊集合转换成精确值
最大隶属度法
将模糊集合中隶属度最大的元素作为输出值
如果隶属度最大的元素不只一个,则取平均值
重心法
取隶属度曲线与横坐标围成面积的重心作为输出值
当出现无穷积分时,可以取曲线拐点使用如下的离散中心法对于具有
个输出量化等级的离散域情况
加权平均法(
为权重系数)
: 设有一个水箱,通过调节阀可向内注水和向外抽水。设计一个模糊控制器,通过调节阀门将水位稳定在固定点附近。按照日常操作经验,有如下基本的控制规则:若水位高于O点,则向外排水,差值越大,排水越快;若水位低于O点,则向内注水,差值越大,注水越快。
- 系统的输入为水位距O点的距离,设为偏差
,输出为阀门开度的变化 ,所设计的控制器为单变量一维模糊控制器 - 量化:由于没有精确值,可直接设定
的量化等级为7,即 量化为 共7个模糊值;设定 的量化等级为9,即 量化为 共9个模糊值 - 模糊化:设定
和 的语言值均为5,即给定5个模糊集合,分别是 ,以表格形式呈现 和 的隶属度函数 隶属度:
e隶属度 -3 -2 -1 0 +1 +2 +3 PB 0 0 0 0 0 0.5 1 PS 0 0 0 0 1 0.5 0 ZO 0 0 0.5 1 0.5 0 0 NS 0 0.5 1 0 0 0 0 NB 1 0.5 0 0 0 0 0
隶属度:
u隶属度 -4 -3 -2 -1 0 +1 +2 +3 +4 PB 0 0 0 0 0 0 0 0.5 1 PS 0 0 0 0 0 0.5 1 0.5 0 ZO 0 0 0 0.5 1 0.5 0 0 0 NS 0 0.5 1 0.5 0 0 0 0 0 NB 1 0.5 0 0 0 0 0 0 0
根据日常操作经验,可以设计如下规则,并得到控制规则表
- 规则1:if e NB then u NB
- 规则2:if e NS then u NS
- 规则3:if e ZO then u ZO
- 规则4:if e PS then u PS
- 规则5:if e PB then u PB
e NB NS ZO PS PB u NB NS ZO PS PB 当
,有 ,满足规则1,则 ,即有输出模糊集为 ,采用最大隶属度法可知 当
,有 ,满足规则1和2,则 , ,有输出的模糊集为 ,采用最大隶属度法可知
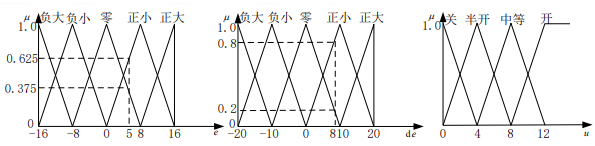
: 在流量控制器中,以误差
和误差变化 为输入,以阀门流量校正量 为输出设计二维模糊控制器。
- 量化与模糊化:将
和 设定5个语言值 ,将 设定4个语言值 ,隶属度函数如图所示
- 给定规则如下
- 规则1:if e PS or de PS then u HO
- 规则2:if e PS or de ZO then u M
- 给定
,满足规则1和2,求
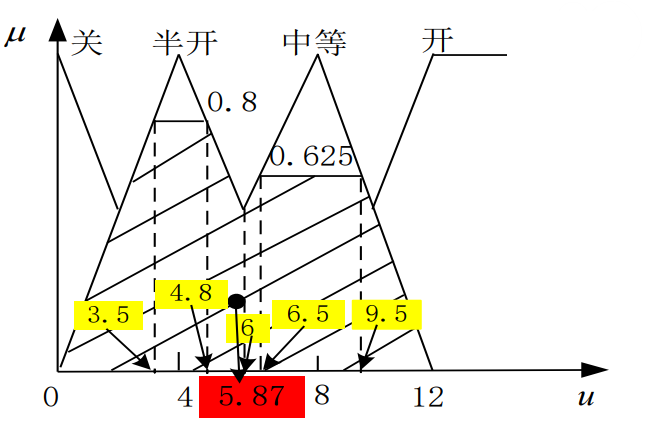
- 有输出的模糊集为
,其曲线图像如下,可以对阴影部分进行重心法求解进行解模糊化
- Title: 智能控制1-模糊控制
- Author: OwwO99
- Created at: 2023-09-12 23:26:06
- Updated at: 2023-09-13 17:29:21
- Link: https://redefine.ohevan.com/2023/09/12/2023-9-12-智能控制1-模糊控制/
- License: This work is licensed under CC BY-NC-SA 4.0.